ÖC(j©®)Ų„╚╦▒▄šŽ╩ŪÖC(j©®)Ų„╚╦╝╝ąg(sh©┤)ųąę╗ĒŚ(xi©żng)╗∙ĄA(ch©│)ę▓╩ŪĻP(gu©Īn)µIĄ─╣”─▄Ż¼╦³ų╝į┌ūīÖC(j©®)Ų„╚╦ąąäė(d©░ng)▀^(gu©░)│╠ųą▒ŻūC▓╗░l(f©Ī)╔·┼÷ū▓Ż¼▒▄├ŌĮY(ji©”)śŗ(g©░u)Ą─▀^(gu©░)Č╚└Ž╗»Īó├ō┬õĪŻÖC(j©®)Ų„╚╦▒▄šŽ╝╝ąg(sh©┤)Ą─║╦ą─░³└©┴╦é„ĖąŲ„Ą─▀xō±║═ęÄ(gu©®)äØ╦ŃĘ©Ą─▀xō±ĪŻ
ÖC(j©®)Ų„╚╦▒▄šŽĄ─▓ĮŻ¼╩ŪūīÖC(j©®)Ų„╚╦─▄ē“Ėąų¬ų▄ć·Łh(hu©ón)Š│ĪŻę╗░ŃüĒ(l©ói)šf(shu©Ł)Ż¼╬ęéāąĶę¬═©▀^(gu©░)é„ĖąŲ„ĮoÖC(j©®)Ų„╚╦╠ß╣®ų▄ć·Łh(hu©ón)Š│Ą─ģóöĄ(sh©┤)ųĖś╦(bi©Īo)ĪŻ└²╚ńšŽĄK╬’Ą─│▀┤ńĪóą╬ĀŅ║═╬╗ų├Ą╚ĪŻ─┐Ū░▒▄šŽ╩╣ė├Ą─é„ĖąŲ„Ė„ĘNĖ„śėŻ¼Ųõ╠ž³c(di©Żn)║═▀mė├ĘČć·ę▓▓╗═¼ĪŻĖ∙ō■(j©┤)▓╗═¼Ą─įŁ└ĒŻ¼┐╔Ęų×ķŻ║│¼┬Ģ▓©é„ĖąŲ„Īó╝t═Ōé„ĖąŲ„Īó╝ż╣Ōé„ĖąŲ„║═ęĢėX(ju©”)é„ĖąŲ„Ą╚ĪŻ
1Ż®│¼┬Ģ▓©é„ĖąŲ„
│¼┬Ģ▓©é„ĖąŲ„Ą─įŁ└Ē╩ŪŻ║Ž╚░l(f©Ī)│÷│¼┬Ģ▓©Ż¼╚╗║¾Öz£y(c©©)Ę┤╔õ▓©Ą─čė▀tŻ¼Ė∙ō■(j©┤)┬Ģ╦┘ėŗ(j©¼)╦Ń─┐ś╦(bi©Īo)┼c╬’¾wų«ķgĄ─ŠÓļxĪŻė╔ė┌│¼┬Ģ▓©į┌┐šÜŌųąĄ─╦┘Č╚║═رČ╚Ż¼£žČ╚ėąĻP(gu©Īn)Ż¼į┌īŹ(sh©¬)█`ųąŻ¼ąĶę¬┐╝æ]ĄĮ▀@ą®ę“╦žĄ─ūā╗»ĪŻ┴Ē═ŌŻ¼│¼┬Ģ▓©é„ĖąŲ„Ą─ėąą¦ŠÓļxŻ¼ę╗░ŃąĪė┌10mŻ¼▓óŪęĢ■(hu©¼)ėąąĪ╝sÄū╩«║┴├ūĄ─Öz£y(c©©)├ż³c(di©Żn)Ż¼╦³ų╗─▄ė├ė┌ąĪą═ĒŚ(xi©żng)─┐ĪŻ│¼┬Ģ▓©é„ĖąŲ„│╔▒ŠĄ═┴«Ż¼╝╝ąg(sh©┤)│╔╩ņŻ¼įŁ└Ē║å(ji©Żn)å╬Ż¼╩Ū│Żė├Ą─é„ĖąŲ„ĪŻ
2Ż®╝t═Ōé„ĖąŲ„
╝t═Ōé„ĖąŲ„┤¾ČÓ╗∙ė┌╚²ĮŪ£y(c©©)┴┐įŁ└ĒĪŻ░l(f©Ī)╔õŲ„ęįę╗Č©Ą─ĮŪČ╚Ž“┤²£y(c©©)╬’¾w░l(f©Ī)╔õ╝t═Ō╣Ō╩°Ż¼▒╗╬’¾wĘ┤╔õ╗žüĒ(l©ói)║¾ė├┴Ēę╗éĆ(g©©)Įė╩šŲ„Öz£y(c©©)ĄĮŻ¼Ģ■(hu©¼)Ą├ĄĮę╗éĆ(g©©)Ų½ęŲųĄĪŻ└¹ė├Äū║╬ĻP(gu©Īn)ŽĄ┐╔ęįĖ∙ō■(j©┤)░l(f©Ī)╔õĮŪČ╚ėŗ(j©¼)╦ŃĄ├ĄĮé„ĖąŲ„┼c╬’¾wĄ─ŠÓļxĪŻ│ŻęŖ(ji©żn)Ą─╝t═Ōé„ĖąŲ„Ą─£y(c©©)┴┐ŠÓļxČ╝▒╚▌^Į³Ż¼ąĪė┌│¼┬Ģ▓©é„ĖąŲ„Ą─ŠÓļxĪŻ┴Ē═ŌŻ¼ī”(du©¼)ė┌═Ė├„Ą─╬’¾wŻ©└²╚ń▓Ż┴¦Ą╚Ż®╝t═ŌŠĆĢ■(hu©¼)┤®═ĖĄ─▓─┘|(zh©¼)Ż¼╝t═Ōé„ĖąŲ„╩Ū¤o(w©▓)Ę©Öz£y(c©©)ŠÓļxĄ─ĪŻ
3Ż®╝ż╣Ōé„ĖąŲ„
╝ż╣Ōé„ĖąŲ„įŁ└ĒŅÉ╦ŲŪ░ę╗éĆ(g©©)ĘĮĘ©Ż¼ų╗╩Ūė├╝ż╣Ō╠µ┤·┴╦╝t═ŌŠĆüĒ(l©ói)£y(c©©)┴┐ŠÓļxĪŻ│Żė├Ą─£y(c©©)ŠÓĘĮ╩Į╩Ūė╔░l(f©Ī)╔õŲ„░l(f©Ī)│÷│ų└m(x©┤)Ģr(sh©¬)ķg║▄Č╠Ą─├}ø_╝ż╣ŌŻ¼ė╔Įė╩šŲ„Įė╩šĘĄ╗žĄ─ą┼╠¢(h©żo)Ż¼Ė∙ō■(j©┤)╚ļ╔õ▓©┼cĘ┤╔õ▓©Ą─čėĢr(sh©¬)Ż¼£y(c©©)│÷┼c─┐ś╦(bi©Īo)Ą─īŹ(sh©¬)ļHŠÓļxĪŻė╔ė┌╣Ō╦┘▒╚┬Ģ╦┘┐ņ║▄ČÓŻ¼▀@ĘN£y(c©©)┴┐ĘĮ╩Į═∙═∙ė├ė┌┤¾ą═£y(c©©)┴┐Ż¼╚ń║Į╠ņ蹊┐ųąŻ¼Č°▓ó▓╗▀m║Žī”(du©¼)Š½Č╚ę¬Ū¾║▄GĄ─Lė“ĪŻ
4Ż®ęĢėX(ju©”)é„ĖąŲ„
ęĢėX(ju©”)é„ĖąŲ„└¹ė├ČÓéĆ(g©©)é„ĖąŲ„┬ō(li©ón)║Ž╩╣ė├Ż¼═©▀^(gu©░)Å═(f©┤)ļsĄ─╦ŃĘ©─ŻöMėŗ(j©¼)╦Ń│÷╬’¾wĄ─ą╬ĀŅĪó╦┘Č╚ĪóŠÓļxĄ╚ĪŻ▀@ĘNĘĮĘ©ļm╚╗╠Į£y(c©©)ĘČć·▒╚▌^īÆķ¤Ż¼½@╚Īą┼Žó┴┐ę▓┤¾Ż¼Ą½╩Ūī”(du©¼)ÖC(j©®)Ų„╚╦ā╚(n©©i)ų├Ą─╠Ä└ĒŲ„Ą─ę¬Ū¾▒╚▌^GŻ¼Ūęė╔ė┌╠Ä└ĒĢr(sh©¬)ķgĄ─┤µį┌Ż¼ī¦(d©Żo)ų┬ī”(du©¼)Łh(hu©ón)Š│Ą─īŹ(sh©¬)Ģr(sh©¬)Ę┤æ¬(y©®ng)▓ŅĪŻ┤╦═ŌŻ¼╦³ę▓Ģ■(hu©¼)╩šĄĮņF÷▓Ą╚╣ŌīW(xu©”)ę“╦žĄ─Ė╔ö_ĪŻ
─┐Ū░ęŲäė(d©░ng)ŅÉĘ■äš(w©┤)ÖC(j©®)Ų„╚╦Ą─▒▄šŽĖ∙ō■(j©┤)Łh(hu©ón)Š│ą┼ŽóĄ─šŲ╬š│╠Č╚┐╔ęįĘų×ķšŽĄK╬’ą┼Žóęčų¬Ī󚎥K╬’ą┼Žó▓┐Ęų╬┤ų¬╗“═Ļ╚½╬┤ų¬ā╔ĘNĪŻé„Įy(t©»ng)▒▄šŽĘĮĘ©ų„ę¬īŹ(sh©¬)¼F(xi©żn)ÖC(j©®)Ų„╚╦¤o(w©▓)┼÷ū▓╚½Šų┬ĘÅĮęÄ(gu©®)äØŻ¼ų„ę¬▓╔ė├╚╦╣żä▌(sh©¼)ł÷(ch©Żng)Ę©Īó¢┼Ė±Ę©Īóūįė╔┐šķgĘ©Ą╚╦ŃĘ©ĪŻé„Įy(t©»ng)▒▄šŽĘĮĘ©ī”(du©¼)šŽĄK╬’ą┼Žó╝║ų¬Ģr(sh©¬)Ą─▒▄šŽå¢(w©©n)Ņ}╠Ä└Ē╔ą┐╔Ż¼Ą½«ö(d©Īng)šŽĄKą┼Žó╬┤ų¬╗“š▀šŽĄK╩Ū┐╔ęŲäė(d©░ng)Ą─Ģr(sh©¬)║“Ż¼é„Įy(t©»ng)Ą─ī¦(d©Żo)║ĮĘĮĘ©ę╗░Ń▓╗─▄║▄║├Ą─ĮŌøQ▒▄šŽå¢(w©©n)Ņ}╗“š▀Ė∙▒Š▓╗─▄▒▄šŽĪŻČ°īŹ(sh©¬)ļH╔·╗ŅųąŻ¼J┤¾ČÓöĄ(sh©┤)Ą─ŪķørŽ┬Ż¼ÖC(j©®)Ų„╚╦╦∙╠ÄĄ─Łh(hu©ón)Š│Č╝╩Ūäė(d©░ng)æB(t©żi)Ą─Īó┐╔ūāĄ─Īó╬┤ų¬Ą─Ż¼×ķ┴╦ĮŌøQ╔Ž╩÷å¢(w©©n)Ņ}Ż¼╚╦éāę²╚ļ┴╦ėŗ(j©¼)╦ŃÖC(j©®)║═╚╦╣żųŪ─▄Ą╚Lė“Ą─ę╗ą®╦ŃĘ©ĪŻ═¼Ģr(sh©¬)Ą├ęµė┌╠Ä└ĒŲ„ėŗ(j©¼)╦Ń─▄┴”Ą─╠ßG╝░é„ĖąŲ„╝╝ąg(sh©┤)Ą─░l(f©Ī)š╣Ż¼į┌ÖC(j©®)Ų„╚╦ŲĮ┼_(t©ói)╔Ž▀M(j©¼n)ąąę╗ą®Å═(f©┤)ļs╦ŃĘ©Ą─▀\(y©┤n)╦Ńę▓ūāĄ├╚▌ęūŻ¼ė╔┤╦«a(ch©Żn)╔·┴╦ę╗ŽĄ┴ąųŪ─▄▒▄šŽĘĮĘ©Ż¼▒╚▌^¤ßķTĄ─ėąŻ║▀zé„╦ŃĘ©Īó╔±Įø(j©®ng)ŠW(w©Żng)Įj(lu©░)╦ŃĘ©Īó─Ż║²╦ŃĘ©Ą╚ĪŻ
Ę■äš(w©┤)ÖC(j©®)Ų„╚╦▒▄šŽ─▄┴”£y(c©©)įć┐╔Ęų×ķā╔ŅÉŻ║šŽĄK╬’╠Į£y(c©©)£y(c©©)įć║═šŽĄK╬’ęÄ(gu©®)▒▄£y(c©©)įćĪŻ
▒Š£y(c©©)įćĄ──┐Ą─╩Ū┼ąČ©ÖC(j©®)Ų„╚╦ßśī”(du©¼)▓╗═¼Äū║╬ą╬ĀŅ║═▓─┘|(zh©¼)šŽĄK╬’Ģr(sh©¬)Ą─╠Į£y(c©©)─▄┴”║═šŽĄK╬’ŠÓļxÖz£y(c©©)─▄┴”ĪŻšŽĄK╬’ģóöĄ(sh©┤)ę╗░Ń╗∙ė┌ųŲįņ╔╠ųĖČ©Ą─ąĪ║═┤¾é„ĖąĘČć·┤_Č©Ż¼ÖC(j©®)Ų„╚╦╬┤▒ž─▄ūR(sh©¬)äeĄĮ▀ģĮńģóöĄ(sh©┤)šŽĄK╬’ĪŻ
1Ż®£y(c©©)įćŁh(hu©ón)Š│
£y(c©©)įćģ^(q©▒)ė“æ¬(y©®ng)ūŃē“┤¾Ż¼┐╔╚▌╝{ÖC(j©®)Ų„╚╦║═ųŲįņ╔╠┬Ģ├„Ą─┤¾ęÄ(gu©®)Č©ĘČć·Ą─šŽĄK╬’Ż¼╚ńłD╦∙╩ŠĪŻÖC(j©®)Ų„╚╦┼cšŽĄK╬’ų«ķg▓╗æ¬(y©®ng)ėą╚╬║╬šŽĄK╬’ĪŻ£y(c©©)įćŁh(hu©ón)Š│Ą─ē”▒┌▓╗æ¬(y©®ng)įōėą╚╬║╬ś╦(bi©Īo)ėøĪŻ
2Ż®£y(c©©)įćĘĮĘ©
£y(c©©)įćĢr(sh©¬)┐╔░³║¼┴∙éĆ(g©©)ęÄ(gu©®)Ė±šŽĄK╬’Ż¼Ęųäe╩Ū╦╔─Šē”├µĪó▓Ż┴¦ē”├µĪó╦╔─Šū└Īóäéąįū└Īó┤¾łAų∙ĪóąĪłAų∙ĪŻ├┐┤╬£y(c©©)įćū±čŁęįŽ┬£y(c©©)įćĘĮĘ©Ż║
A. ÖC(j©®)Ų„╚╦╠Äė┌│§╩╝╬╗ū╦Ż╗
B. ī󚎥K╬’Ę┼ų├į┌ųŲįņ╔╠┬Ģ├„Ą─┤¾ęÄ(gu©®)Č©ĘČć·║¾Ż¼ė╔ÖC(j©®)Ų„╚╦Öz£y(c©©)šŽĄK╬’Ą─╬╗ų├Ż╗
C. ī󚎥K╬’Ę┼ų├į┌ąĪęÄ(gu©®)Č©ĘČć·║¾Ż¼ė╔ÖC(j©®)Ų„╚╦£y(c©©)┴┐šŽĄK╬’Ą─╬╗ų├ĪŻ
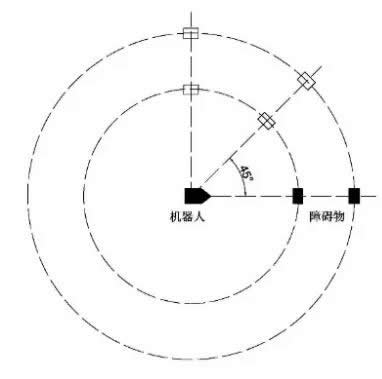
D. ī󚎥K╬’Ę┼ų├į┌ŽÓī”(du©¼)ė┌ÖC(j©®)Ų„╚╦Ą─ęĢŠĆ─µĢr(sh©¬)ßś45ĪŃĘĮŽ“Ą─ų▒ŠĆ╔ŽŻ¼ųžÅ═(f©┤)▓Į¾EB║═CĪŻ├┐┤╬£y(c©©)┴┐═Ļ│╔║¾Ż¼─µĢr(sh©¬)ßśį÷╝ė45ĪŃĮŪŻ¼ųžÅ═(f©┤)▓Į¾EDĪŻ«ö(d©Īng)ÖC(j©®)Ų„╚╦ĄĮ▀_(d©ó)│§╩╝╬╗ų├Ģr(sh©¬)Ż¼│╠ą“═Żų╣ĪŻš{(di©żo)š¹šŽĄK╬’Ą─ĘĮŽ“Ż¼╩╣Ųõ┤¾Ą─ę╗├µ├µŽ“ÖC(j©®)Ų„╚╦ĪŻ═©▀^(gu©░)ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦┤·╠µšŽĄK╬’Ż¼┐╔ęįīŹ(sh©¬)¼F(xi©żn)šŽĄK╬’Ą─ŽÓī”(du©¼)Č©╬╗ĪŻ
2Ī󚎥K╬’ęÄ(gu©®)▒▄£y(c©©)įć
▒Š£y(c©©)įćĄ──┐Ą─╩Ū┼ąČ©ÖC(j©®)Ų„╚╦═©▀^(gu©░)═Żų╣╗“ł╠(zh©¬)ąą▀m«ö(d©Īng)?sh©┤)─ę?gu©®)▒▄äė(d©░ng)ū„üĒ(l©ói)Ę└ų╣┼cņoæB(t©żi)╗“äė(d©░ng)æB(t©żi)šŽĄK╬’┼÷ū▓Ą──▄┴”ĪŻį┌šŽĄK╬’┼cÖC(j©®)Ų„╚╦Ą─╚╬║╬▓┐Ęų░l(f©Ī)╔·╬’└ĒĮėė|Ū░Ż¼ÖC(j©®)Ų„╚╦ąĶę¬═Żų╣ĪŻ╚ń░l(f©Ī)╔·▒▄šŽäė(d©░ng)ū„Ż¼æ¬(y©®ng)░┤ššųŲįņ╔╠Ą─ęÄ(gu©®)Č©Ż¼▒Ż│ųšŽĄK╬’┼cÖC(j©®)Ų„╚╦╚╬║╬▓┐╝■ų«ķgĄ─ąĪŠÓļxĪŻ
1Ż®£y(c©©)įćŁh(hu©ón)Š│
īóÖC(j©®)Ų„╚╦Ę┼ų├į┌│§╩╝╬╗ų├Ż¼ŠÓļx─┐ś╦(bi©Īo)╬╗ų├9éĆ(g©©)ķL(zh©Żng)Č╚å╬╬╗Ż¼ŲĮõüę╗īėŻ¼╚ńŽ┬łD╦∙╩ŠĪŻņoæB(t©żi)šŽĄK╬’║═äė(d©░ng)æB(t©żi)šŽĄK╬’Ą─äė(d©░ng)ū„╚ńŽ┬łD╦∙╩Š:
äė(d©░ng)ū„1Ż║ī󚎥K╬’Ę┼ų├į┌│§╩╝╬╗ų├║═─┐ś╦(bi©Īo)╬╗ų├ų«ķgŻ¼▒Ż│ųņoų╣Ż╗
äė(d©░ng)ū„2Ż║ęį┼cÖC(j©®)Ų„╚╦▀\(y©┤n)ąą┬ĘÅĮ┤╣ų▒90ĪŃĄ─ĘĮŽ“Ż¼ī󚎥K╬’ęŲäė(d©░ng)ĄĮ╬╗ų├P2Ż╗
äė(d©░ng)ū„3Ż║ęį┼cÖC(j©®)Ų„╚╦▀\(y©┤n)ąą┬ĘÅĮ┤╣ų▒45ĪŃĄ─ĘĮŽ“Ż¼ī󚎥K╬’ęŲäė(d©░ng)ĄĮ╬╗ų├P3Ż╗
äė(d©░ng)ū„4Ż║į┌ÖC(j©®)Ų„╚╦▀\(y©┤n)ąą┬ĘÅĮ╔ŽŻ¼ī󚎥K╬’ęŲäė(d©░ng)ĄĮ╬╗ų├P1Ż¼ęįūĶų╣ÖC(j©®)Ų„╚╦Å─│§╩╝╬╗ų├ĄĮ▀_(d©ó)─┐ś╦(bi©Īo)╬╗ų├ĪŻ
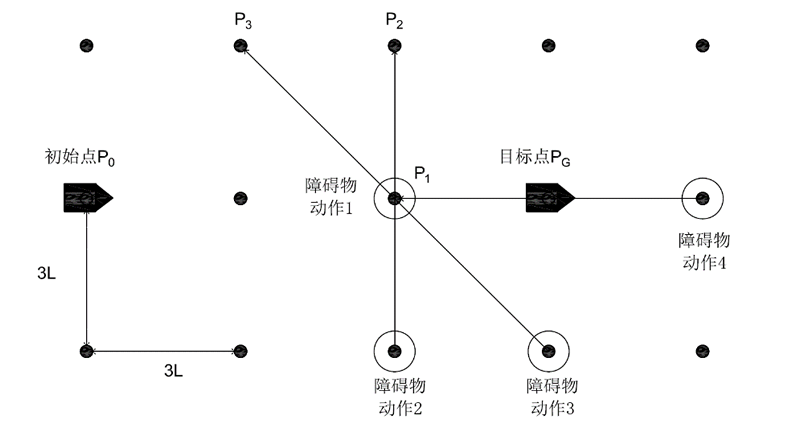
×ķ┴╦¾w¼F(xi©żn)╚╦ŅÉĄõą═Ą─ąąū▀╦┘Č╚Ż¼Į©ūhšŽĄK╬’Ą─╦┘Č╚×ķ1.6m/sŻ¼┐╔▓╔ė├ęŲäė(d©░ng)ŲĮ┼_(t©ói)╗“ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦╠µ┤·ĪŻšŽĄK╬’Ą─äė(d©░ng)ū„ĒÜ┼cÖC(j©®)Ų„╚╦Ą─äė(d©░ng)ū„═¼▓ĮŻ¼╩╣Ųõ═¼Ģr(sh©¬)▀_(d©ó)ĄĮP1Ą─╬╗ų├ĪŻ
2Ż®£y(c©©)įćĘĮĘ©
įō£y(c©©)įć┐╔Ė∙ō■(j©┤)ęį╔Ž├Ķ╩÷ą╬│╔╩«ĘN£y(c©©)įćė├└²Ż¼├┐┤╬£y(c©©)įćæ¬(y©®ng)ū±čŁęįŽ┬£y(c©©)įćĘĮĘ©Ż║
A. īóÖC(j©®)Ų„╚╦Ę┼ų├į┌│§╩╝╬╗ų├P0Ż¼ęįųŲįņ╔╠ęÄ(gu©®)Č©Ą─ĮoČ©ł÷(ch©Żng)Š░Ņ~Č©╦┘Č╚║═žō(f©┤)▌dęŲäė(d©░ng)ĄĮ─┐ś╦(bi©Īo)╬╗ų├PGĪŻ«ö(d©Īng)ÖC(j©®)Ų„╚╦ĄĮ▀_(d©ó)─┐ś╦(bi©Īo)╬╗ų├Ģr(sh©¬)Ż¼ėøõø▀\(y©┤n)ąąĢr(sh©¬)ķgŻ╗
B. į┌├┐┤╬▀M(j©¼n)ąąšŽĄKäė(d©░ng)ū„1Īó2Īó3╗“4Ģr(sh©¬)Ż¼īóÖC(j©®)Ų„╚╦Ę┼ų├į┌│§╩╝╬╗ų├P0Ż¼ī󚎥K╬’Ę┼ų├į┌šŽĄKäė(d©░ng)ū„│§╩╝╬╗ų├Ż╗
C. ╩╣ÖC(j©®)Ų„╚╦ęįųŲįņ╔╠ęÄ(gu©®)Č©Ą─ĮoČ©ł÷(ch©Żng)Š░Ņ~Č©╦┘Č╚║═žō(f©┤)▌dęŲäė(d©░ng)ĄĮ─┐ś╦(bi©Īo)╬╗ų├PGŻ¼═¼Ģr(sh©¬)╩╣šŽĄK╬’Ęųäeę└ō■(j©┤)šŽĄKäė(d©░ng)ū„2Īó3╗“4ę¬Ū¾ęŲäė(d©░ng)ų┴ĮK³c(di©Żn)╬╗ų├ĪŻšŽĄK╬’Ą─│§╩╝╬╗ų├┐╔ęįčžų▒ŠĆ┬ĘÅĮš{(di©żo)š¹Ż¼ęį▒ŻūCį┌šŽĄK╬’ęį1.6 m/sĄ─╦┘Č╚▀\(y©┤n)äė(d©░ng)Ģr(sh©¬)Ż¼ÖC(j©®)Ų„╚╦║═šŽĄK╬’═¼Ģr(sh©¬)▀_(d©ó)ĄĮP1╬╗ų├Ż╗
D. «ö(d©Īng)ÖC(j©®)Ų„╚╦ĄĮ▀_(d©ó)─┐ś╦(bi©Īo)╬╗ų├Ģr(sh©¬)Ż¼ėøõø▀\(y©┤n)ąąĢr(sh©¬)ķgĪŻ
╚ń╣¹ÖC(j©®)Ų„╚╦ø](m©”i)ėą▀_(d©ó)ĄĮ─┐ś╦(bi©Īo)╬╗ų├╗“į┌ąą▀M(j©¼n)▀^(gu©░)│╠ųą┼÷ĄĮšŽĄK╬’Ż¼ätęĢ×ķįć“×(y©żn)╩¦öĪĪŻßśī”(du©¼)ę╗éĆ(g©©)╠žČ©Ą─£y(c©©)įćė├└²Ż¼Å─ę╗ķ_(k©Īi)╩╝ų┴▀B└m(x©┤)╚²┤╬įć“×(y©żn)│╔╣”║¾Ż¼ęĢ×ķ▒▄šŽ│╔╣”ĪŻ╚ń╣¹Ū░╚²┤╬įć“×(y©żn)ųąų┴╔┘ėąę╗┤╬╩¦öĪŻ¼ätæ¬(y©®ng)īó┤╦£y(c©©)įćęĢ×ķ╩¦öĪĪŻ▀x╚ĪŪ░╚²┤╬įć“×(y©żn)│╔╣”║¾Ą─ŲĮŠ∙¤o(w©▓)šŽĄK▀\(y©┤n)ąąĢr(sh©¬)ķg×ķ¤o(w©▓)šŽĄK▀\(y©┤n)ąąĢr(sh©¬)ķgT0ĪŻ▀x╚ĪŪ░╚²┤╬│╔╣”įć“×(y©żn)Ą─┤¾Ä¦šŽĄK▀\(y©┤n)ąąĢr(sh©¬)ķg×ķĦšŽĄK▀\(y©┤n)ąąĢr(sh©¬)ķgT1ĪŻčė▀tę“ūė┐╔Č©┴x×ķT1/T0Ą─ųĄĪŻ
ĪŠ┘ÉĄŽÖC(j©®)Ų„╚╦ų▄ų▄šäĪ┐
 |
| ╔╠ė├ÖC(j©®)Ų„╚╦ Disinfection Robot š╣ÅdÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P ųvĮŌÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P ųŪ─▄╦═▓═ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®) ÖC(j©®)Ų„╚╦OEM┤·╣żÅS Ž¹ČŠÖC(j©®)Ų„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ łDĢ°^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)Ž¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ Ū░┼_(t©ói)ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ ŠŲĄĻ╦═╬’ÖC(j©®)Ų„╚╦ įŲ█E┐Ų╝╝ØÖ(r©┤n)ÖC(j©®)Ų„╚╦ įŲ█EŠŲĄĻÖC(j©®)Ų„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ |