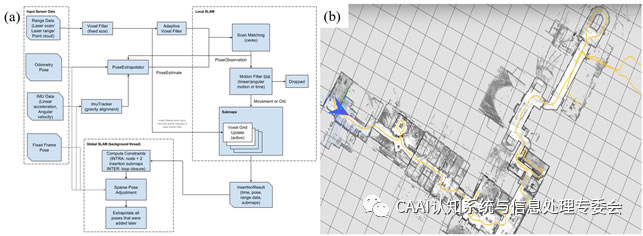
Cartographer[1]╩Ūgoogleį┌2016─Ļķ_į┤[2]Ą─┐ńŲĮ┼_║═é„ĖąŲ„┼õų├Ż¼▓ó╠ß╣®2D║═3DīŹĢr═¼▓ĮČ©╬╗║═Į©łDĄ─SLAMŽĄĮyŻ¼ų„ę¬═©▀^ķ]ŁhÖz£yüĒŽ¹│²śŗłD▀^│╠ųą«a╔·Ą─└█Ęeš`▓ŅŻ¼ęį▀_ĄĮ╚┌║ŽČÓé„ĖąŲ„öĄō■Ą─Šų▓┐submapäōĮ©║═ė├ė┌ķ]ŁhÖz£yĄ─scan match▓▀┬įĄ─īŹ¼FĪŻų„ę¬░³└©cartographer║═Cartographer_rosā╔▓┐ĘųŻ¼Ųõųącartographer×ķĄūīėīŹ¼FŻ¼ų„꬞ōž¤╠Ä└ĒüĒūįLaserĪóIMUĪóOdemetryĄ─öĄō■▓ó╗∙ė┌▀@ą®öĄō■▀MąąĄžłDĄ─śŗĮ©ĪŻcartographer_ros╩Ū╗∙ė┌cartographerĄ─╔Žīėæ¬ė├Ż¼ų„꬞ōž¤Å─rosĄ─═©ą┼ÖCųŲ½@╚Īé„ĖąŲ„Ą─öĄō■▓óīó╦³éā▐DōQ│╔cartographerųąČ©┴xĄ─Ė±╩Įé„▀fĮocartographer╠Ä└ĒŻ¼┼c┤╦═¼Ģrę▓īócartographerĄ─╠Ä└ĒĮY╣¹ė├ė┌░l▓╝Īó’@╩Š╗“▒Ż┤µĪŻ
(2) MC2SLAM
MC2SLAM[3]╩ŪFrank Neuhaus╠ß│÷Ą─ę╗éĆīŹĢr╝ż╣Ō└’│╠ėŗŽĄĮyŻ¼╠ß│÷┴╦ę╗ĘNĘŪäéąįŲź┼õ╦ŃĘ©Ż©non-rigidregistrationŻ®Ż¼═©▀^░č³cįŲ╗¹ūāčaāö║═³cįŲŲź┼õĮyę╗ĄĮę╗éĆā×╗»╚╬äšų«ųąŻ¼╝┤Ž╚ī”³cįŲ▀Mąą╗¹ūāčaāöŻ¼ļS║¾▓╔ė├čaāö║¾Ą─³cįŲ▀Mąą╬╗ū╦Ųź┼õĪŻČ°┤╦Ū░Ą─Ųõ╦¹SLAMĘĮĘ©Ż¼▀@ā╔▓Į╩ŪŽÓ╗źd┴ó▀MąąĄ─ĪŻ║¾į┌║¾Č╦╩╣ė├IMUŅAĘeĘų▀Mąą╬╗ū╦łDā×╗»Ż¼Å─Č°╠ßGŠ½Č╚ĪŻÅ─ū„š▀Įo│÷Ą─£yįćĮY╣¹Ż¼įōĘĮĘ©║═IMLSĄ─Š½Č╚ŽÓ«öŻ¼Š½Č╚ā×ė┌LOAMĪŻ
(3) LeGO-LOAM
LeGO-LOAM[4]╩Ūę╗ĘN▌p┴┐J║═Ąž├µā×╗»Ą─╝ż╣Ō└ū▀_└’│╠ėŗ║═Į©łDĘĮĘ©Ż¼┐╔ė├ė┌īŹĢr╣└ėŗęŲäėŲĮ┼_Ą─┴∙ūįė╔Č╚ū╦æBĪŻ┐╔ęįį┌Ą═╣”║─ŪČ╚ļ╩ĮŽĄĮy╔ŽīŹ¼FīŹĢrū╦æB╣└ėŗĪŻLeGO-LOAMį┌ĘųĖŅ║═ā×╗»▓Į¾Eųą└¹ė├┴╦Ąž├µĄ─╝s╩°ĪŻŽ╚æ¬ė├³cįŲĘųĖŅüĒ×V│²įļ┬ĢŻ¼▓ó▀Mąą╠žš„╠ß╚ĪŻ¼ęį½@Ą├d╠žĄ─ŲĮ├µ║═▀ģŠē╠žš„ĪŻ╚╗║¾Ż¼▓╔ė├Levenberg-Marquardtā×╗»ĘĮĘ©Ż¼╩╣ė├ŲĮ├µ║═▀ģŠē╠žš„üĒĮŌøQ▀B└mÆ▀├Ķųą┴∙éĆūįė╔Č╚ūāōQĄ─▓╗═¼Ęų┴┐ĪŻŽĄĮyĮė╩šüĒūį3D╝ż╣Ō└ū▀_Ą─▌ö╚ļ▓ó▌ö│÷6éĆDOFū╦ä▌╣└ėŗĪŻš¹éĆŽĄĮyĘų×ķ╬ÕéĆ─ŻēKĪŻ Ž╚╩ŪsegmentationŻ¼╩╣ė├å╬┤╬Æ▀├ĶĄ─³cįŲŻ¼▓óīóŲõ═Čė░ĄĮĘČć·łDŽ±╔Ž▀MąąĘųČ╬Ż©ŠĆŻ®Ż╗╚╗║¾īóĘųČ╬Ą─³cįŲ░l╦═ĄĮfeature extraction─ŻēKŻ╗╚╗║¾╝ż╣Ō└ū▀_£yŠÓāx╩╣ė├Å─Ū░ę╗─ŻēKųą╠ß╚ĪĄ─╠žš„üĒšęĄĮ┼c▀B└mÆ▀├ĶŽÓĻPĄ─ūāōQŻ╗▓óīó▀@ą®╠žš„į┌lidar mappingųą▀Mę╗▓Į╠Ä└ĒŻ¼īó╦³éāś╦ėøĄĮ╚½Šų³cįŲłDĪŻ║¾Ż¼transform integration─ŻēK╚┌║Ž┴╦╝ż╣Ō└ū▀_£yŠÓ║═╝ż╣Ō└ū▀_£y└LĄ─ū╦æB╣└ėŗĮY╣¹Ż¼▓ó▌ö│÷ĮKĄ─ū╦æB╣└ėŗĪŻ
(4) SUMA++
SUMA++[5]╩ŪSLAM┤¾┼ŻCyrillĮM╗∙ė┌SUMA[6]ķ_į┤Ą─╗∙ė┌šZ┴xą┼ŽóĄ─╝ż╣Ō└ū▀_SLAMŽĄĮyŻ¼į┌┤¾ČÓöĄł÷Š░Ž┬Ż¼┐╔ęį║▄║├Ą─▀^×VäėæB╬’¾wŻ¼▓ó×ķÖCŲ„╚╦ŽĄĮy╠ß╣®£╩┤_Ą─Č©╬╗║═ĄžłDśŗĮ©ĪŻįōŽĄĮy═©▀^ŠĒĘe╔±ĮøŠWĮjī”╝ż╣Ō└ū▀_³cįŲ▀MąąšZ┴xĘųĖŅŻ¼▓óĮY║ŽÄū║╬╔ŅČ╚ą┼ŽóŻ¼╠ßGšZ┴xĘųĖŅĄ─Š½Č╚▓ó║Ž│╔×ķĦšZ┴xś╦ėøĄ─╝ż╣Ō└ū▀_³cįŲŻ¼═©▀^įō³cįŲśŗĮ©Ä¦ėąšZ┴xą┼ŽóŪę╚½Šųę╗ų┬Ą─│Ē├▄surfelšZ┴xĄžłDĪŻ║¾Ż¼└¹ė├Æ▀├Ķ║═ĄžłDų«ķgĄ─šZ┴xę╗ų┬ąįüĒ▀^×V│÷äėæB╬’¾wŻ¼▓óį┌ICP▀^│╠ųą═©▀^šZ┴x╝s╩°üĒ╠ßGū╦æB╣└ėŗĄ─Š½Č╚ĪŻį┌KITTIöĄō■╝»╔ŽČ©╬╗Š½Č╚║═¶ö░¶ąįČ╝ėąĘŪ│Ż║├Ą─▒Ē¼FŻ¼×ķäėæBł÷Š░Ž┬Ą─ūįų„ęŲäėÖCŲ„╚╦ī¦║Į║═║═äėæB▒▄šŽ╠ß╣®┴╦║▄║├Ą─╦╝┬ĘĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |