«öŪ░ÖCŲ„╚╦ąąśIĄ─ķ_░l┐“╝▄▓Ņ«É╗»’@ų° Ż¼╗∙ė┌ ĘŌķ]╔·æBĄ─ÖCŲ„╚╦įOėŗęŌ╬Čų°ÖCŲ„╚╦Ą─▄øė▓╝■ ═©│Ż╩Ū╣╠Č©ŪęīŻė├Ą─ Ż¼ī¦ų┬┴╦╝µ╚▌═žš╣ąį▓ŅĪó ŠSūo▀węŲ│╔▒ŠĖ▀Ą╚ųTČÓå¢Ņ}ĪŻ
─ŻēK╗»įOėŗ═©▀^īóÖCŲ„╚╦ŽĄĮyĘųĮŌ×ķČÓéĆ▄øė▓ ╝■─ŻēK Ż¼ÅS╔╠║═ė├æ¶┐╔ęįĖ∙ō■▓╗═¼Ą─æ¬ė├ąĶŪ¾ ▀Mąąņ`╗ŅĮM║Ž║═Č©ųŲĪŻ▀@ę╗įOėŗ└Ē─Ņ▓╗āH╠ß╔² ┴╦«aŲĘĄ─▀mæ¬ąį║═┐╔öUš╣ąį Ż¼▀Ć×ķ╝╝ągĄ─äōą┬ ┼c«aŲĘĄ─Ą³┤·╠ß╣®┴╦┐╔─▄ąį Ż¼╩Ūķ_Ę┼ąįĄ─╚½ŚŻ ╩ĮųŪ─▄Ę■äšÖCŲ„╚╦╔·æBŽĄĮyĄ─╗∙╩»ĪŻĘ■äšÖCŲ„ ╚╦─ŻēK╗»įOėŗęįČÓéĆ▄øė▓╝■─ŻēKĪ¬Ī¬ęŲäė─Ż ēKĪó▓┘ū„─ŻēKĪóĮ╗╗ź─ŻēKĪóé„Ėą─ŻēK║═öĄō■╠Ä └Ē┼c═©ą┼─ŻēK×ķ║╦ą─ĪŻ═©▀^▀@ĘNņ`╗ŅĄ─įOėŗŻ¼ Ę■äšÖCŲ„╚╦─▄ē“┤¾┤¾╠ß╔²į┌▓╗═¼ł÷Š░ųą─▄ē“ņ`╗Ņæ¬ī”Å═ļs╚╬䚥──▄┴”ĪŻ
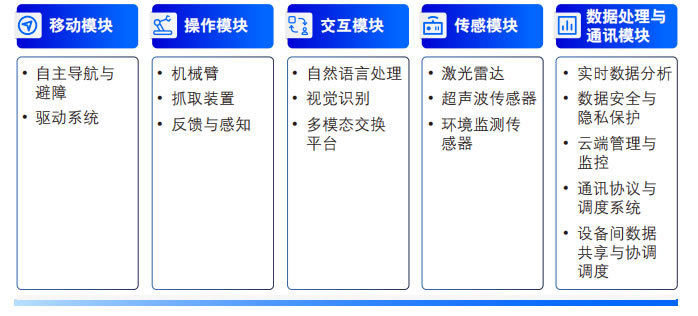
Ę■äšÖCŲ„╚╦Ą──ŻēK╗»įOėŗų„ę¬░³║¼ęįŽ┬ę¬╦žŻ║
1.ęŲäė─ŻēK
ęŲäė─ŻēK╩ŪĘ■äšÖCŲ„╚╦Ą─╗∙ĄA▓┐Ęų Ż¼žōž¤ÖCŲ„ ╚╦Ą─ÖCäėąį║═ī¦║Į Ż¼ų„ę¬ė╔Ąū▒PĪó“īäėŽĄĮy║═ ▀\äė┐žųŲŲ„ĮM│╔ĪŻŲõų„ę¬╣”─▄░³└©Ż║
• ūįų„ī¦║Į┼c▒▄šŽŻ║ė▓╝■┼õų├Ą─╝ż╣Ō└ū▀_Īóé„ĖąŲ„ ║═özŽ±Ņ^┼c▀\äė┐žųŲŽĄĮyĄ─ĮY║ŽŻ¼╩╣ÖCŲ„╚╦─▄ē“ īŹĢrśŗĮ©ŁhŠ│ĄžłDŻ¼▀Mąą┬ĘÅĮęÄäØ║═▒▄šŽĪŻ
• ČÓĘNęŲäė─Ż╩ĮŻ║Ę■äšÖCŲ„╚╦┐╔ęį▀xō±▌å╩ĮĪó┬─ Ħ╩Į╗“ūŃ╩ĮĄ╚▓╗═¼Ą─ęŲäėĘĮ╩ĮŻ¼ęį▀mæ¬▓╗═¼Ą─ ŁhŠ│║═╚╬äšąĶŪ¾ĪŻ└²╚ńŻ¼▌å╩ĮĄū▒P▀m║Ž╩ęā╚ŲĮ ╠╣Ąž├µŻ¼ūŃ╩Įī”ė┌Å═ļsČÓūāĄ─Ąžą╬Ą─▀mæ¬ąįät Ė³ÅŖĪŻ
2.▓┘ū„─ŻēK
▓┘ū„─ŻēK╩ŪīŹ¼FŠ▀¾w╚╬äš▓┘ū„Ą─ĻPµI Ż¼░³└©ÖC ąĄ▒█Īóūź╚Īčbų├║═ł╠ąąŲ„ Ż¼▓óĮY║ŽīŻė├║══©ė├ ╦ŃĘ©ęį╠ß╔²ÖCŲ„╚╦▓┘ū„Ą─ņ`╗Ņąį┼cųŪ─▄ąįĪŻŲõ ų„ę¬╣”─▄╚ńŽ┬Ż║
• Š½╝Ü▓┘ū„─▄┴”Ż║ÖCąĄ▒█═©│Ż┼õéõČÓūįė╔Č╚Ą─ĻP ╣Ø Ż¼╩╣Ųõ─▄ē“═Ļ│╔ČÓśėĄ─äėū„ Ż¼╚ńūź╚ĪĪó░ß ▀\ĪóĘ┼ų├║═ŪÕ└ĒĄ╚ĪŻĮY║Ž═©ė├╦ŃĘ©Ż¼ÖCŲ„╚╦─▄ ē“Ė∙ō■▓╗═¼Ą─▓┘ū„ī”Ž¾║═ŁhŠ│Śl╝■īŹĢrš{š¹Ųõ ūź╚Ī▓▀┬į┼c▓┘ū„ĘĮ╩ĮĪŻ
• ┐╔▀xō±╣żŠ▀┼õ╝■ Ż║▓┘ū„─ŻēK┐╔ęįĖ∙ō■æ¬ė├ąĶ ę¬ Ż¼▌p╦╔Ė³ōQ▓╗═¼Ą─╣żŠ▀║═ĖĮ╝■ Ż¼╚ńūź╚ĪŖA ū”Īóņ`Ū╔╩ųĪó╬³▒P╗“ŪÕØŹ╦óŻ¼▀@▓╗āHžSĖ╗┴╦ÖC Ų„╚╦Ą─╣”─▄Ż¼ę▓į÷ÅŖ┴╦Ųõ═©ė├ąįŻ¼─▄ē“▀mæ¬▓╗ ═¼ł÷Š░Ą─ąĶŪ¾ĪŻ
• Å═ļs╚╬äšł╠ąąŻ║▓┘ū„─ŻēK╝»│╔═©ė├╦ŃĘ©Ż¼╩╣ÖC Ų„╚╦─▄ē“Ė∙ō■ŁhŠ│ūā╗»ųŪ─▄Ąžš{š¹▓┘ū„ĘĮ╩ĮŻ¼ īŹ¼FĖ▀ą¦╚╬äšł╠ąąĪŻ└²╚ńŻ¼į┌▓═’ŗĘ■äšųąŻ¼ÖC Ų„╚╦┐╔─▄ąĶę¬═¼Ģr▀Mąą╩│╬’┼õ╦═Īó▓═Š▀ŪÕ└Ē Ą╚Ż¼▀@ą®╚╬䚥─ł╠ąąę└┘ćė┌═©ė├╦ŃĘ©Ą─ųĖī¦ĪŻ
3.Į╗╗ź─ŻēK
Į╗╗ź─ŻēK╩ŪĘ■äšÖCŲ„╚╦┼cė├æ¶▀Mąą£Ž═©Ą─Įė ┐┌ Ż¼žōž¤╠ß╣®ųŪ─▄╗»Ą─Į╗╗ź¾w“×ĪŻŲõų„ę¬╣”─▄ ░³└©Ż║
• ČÓ─ŻæBĮ╗╗źŻ║ĮĶų·ūį╚╗šZčį╠Ä└ĒŻ©NLPŻ®║═ėŗ ╦ŃÖCęĢėX╝╝ągŻ¼Ę■äšÖCŲ„╚╦─▄ē“═©▀^šZę¶Īó╩ų ä▌║═łDŽ±┼cė├æ¶▀Mąą╗źäėŻ¼╠ß╔²Į╗╗źĄ─ūį╚╗ąį ║═ėH║═┴”ĪŻ
• ŪķĖąĘų╬÷┼cĒææ¬Ż║ĮY║ŽAI╦ŃĘ©Ż¼Į╗╗ź─ŻēK─▄ē“ Ęų╬÷ė├æ¶Ą─ŪķĖąŻ¼š{š¹Ę■äšÖCŲ„╚╦į┌╗źäėųąĄ─ šZÜŌ┼cā╚╚▌Ż¼Å─Č°╠ß╣®Ė³Š▀╚╦ąį╗»║═┘Ną─Ą─Ę■ äš¾w“×ĪŻ
4.é„Ėą─ŻēK
é„Ėą─ŻēK╩Ū┘xėĶĘ■äšÖCŲ„╚╦ŁhŠ│Ėąų¬─▄┴”Ą─ųžę¬ ▓┐ĘųŻ¼░³║¼▄øė▓╝■Ą─ŠC║Žæ¬ė├ĪŻŲõ╣”─▄░³└©Ż║
• ŁhŠ│▒O£yŻ║ĮY║Ž¼F┤·é„ĖąŲ„Ż©╚ń╝ż╣Ō└ū▀_Īó│¼ ┬Ģ▓©é„ĖąŲ„Īó╝t═Ōé„ĖąŲ„Ą╚Ż®╝░īŹĢr╠Ä└Ē▄ø ╝■Ż¼ÖCŲ„╚╦─▄ē“£╩┤_ūRäeų▄ć·Ą─╬’¾w╝░ŁhŠ│Śl ╝■Ż¼ęįų¦│ųųŪ─▄øQ▓▀┼c▓┘ū„ł╠ąąĪŻ
• ╚┌║ŽöĄō■─▄┴” Ż║Ę■äšÖCŲ„╚╦═©▀^öĄō■╠Ä└Ē╦Ń Ę©Ż¼─▄ē“╝»│╔üĒūį▓╗═¼é„ĖąŲ„Ą─ą┼ŽóŻ¼×ķøQ▓▀ ╠ß╣®Ė▀┘|┴┐Ą─öĄō■ų¦│ųŻ¼┤_▒ŻŲõį┌Å═ļsŁhŠ│ųą Ą─▓┘ū„─▄┴”ĪŻ
5.öĄō■╠Ä└Ē┼c═©ą┼─ŻēK
öĄō■╠Ä└Ē┼c═©ą┼─ŻēKžōž¤╩š╝»ĪóĘų╬÷║═╣▄└ĒĘ■ äšÖCŲ„╚╦▀\ąąųąĄ─öĄō■ Ż¼ŽÓæ¬Ą─▄ø╝■ŽĄĮy┤_▒Ż öĄō■░▓╚½┼cėąą¦└¹ė├ĪŻŲõų„ę¬╣”─▄░³└©Ż║
• ģf═¼š{Č╚Ż║═©▀^įOČ©ķ_Ę┼Ą─═©ą┼ģfūh║═Ė▀ą¦Ą─ öĄō■╣▓ŽĒÖCųŲŻ¼┤_▒Ż▓╗═¼ŅÉą═ÖCŲ„╚╦ķg┐╔ęįīŹ ¼FČÓÖCŲ„╚╦ģfū„Ą─ųŪ─▄š{Č╚Ż¼ā×╗»╚╬䚥─Ęų┼õ ║═ł╠ąąą¦┬╩ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |